Texas Torque: Armageddon
Link to BLUE ALLIANCE.
What I did
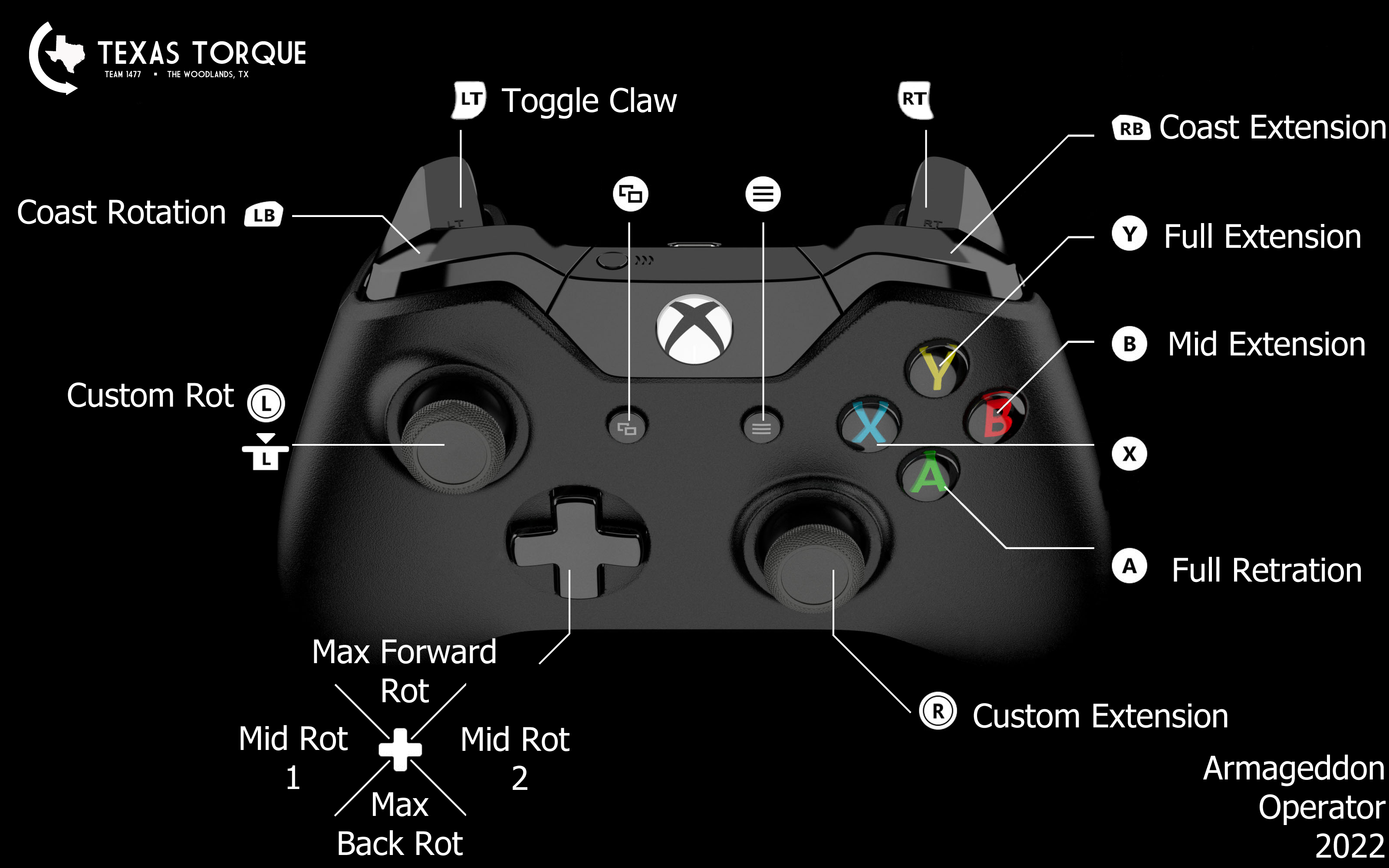
After years of disuse and being scrapped for parts, the team decided to restore the robot. I updated the code of the robot. This involved configuring the Xbox controllers to run motors/actuate pneumatics; tuning Proportional-Integral-Derivative (PID) control loops; and adding cameras to implement computer vision. In addition, despite the drive train on Armageddon being an H-drive, I was able to simulate a swerve drive using an Inertial Measurement Unit.

What I used
The robot’s control systems were programmed using WPILib in Java. The computer vision implemented a You-Only-Look-Once (YOLO) model with OpenCV in Python.
Challenges
With a renovation project, the main challenge is getting parts for the fixes and figuring out what the original designer’s intent was. By studying their design and making inferences, we were able to piece together what we envisioned for the renovated robot.
Robot teaser
Copyright: Attribution-NonCommercial-ShareAlike 4.0 International (CC BY-NC-SA 4.0)
Author: Texas Torque, Michael Menezes
Posted on: May 1, 2022