Texas Torque: Shiva
Link to BLUE ALLIANCE.
What I did
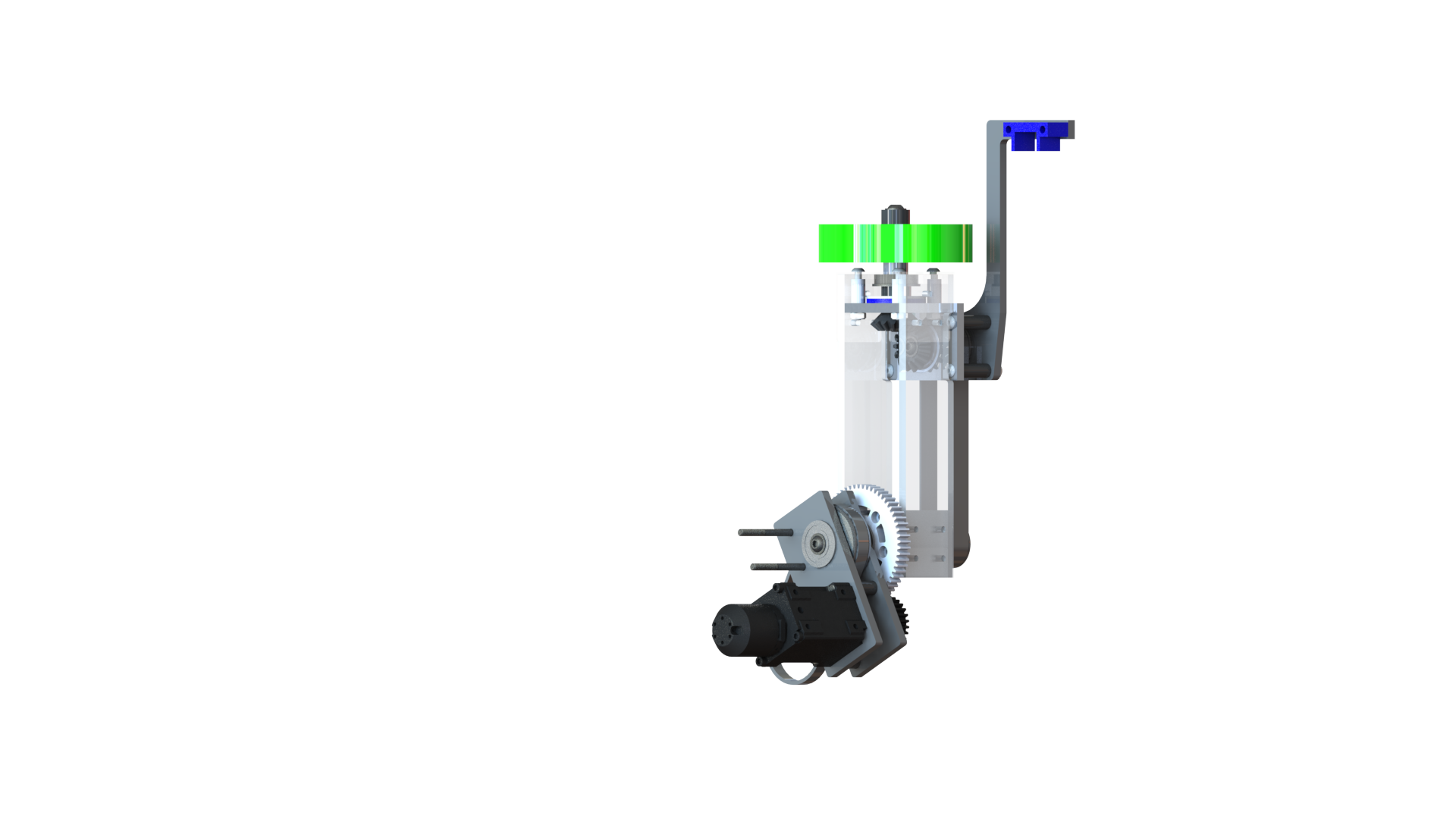
During a general Computer-Aided Design (CAD) training over the summer, the CAD lead saw potential and scouted me. From then, I started to follow the CAD lead and got a closer look into the design of the robot. The CAD lead asked me to design the color wheel subsystem. This subsystem interfaced with a wheel of fortune like obstacle on the field. It had to spin the wheel to a certain color. For our robot to fit in the trench while still being able to reach the wheel. The robot had to deploy spinner mechanism from a folded in position. However, we also had a motor limit. So, I implemented the mechanism deployment and spinning using a coaxial design.
What I used
CAD models were made using Solidworks.
Challenges
Since this was my first design for the team. The design reviews were some what stressful where the mentors and leadership asked questions, made critiques, and offered suggestions while I presented my design. After going though a couple of reviews, I started to understand that we all had the same goal and their comments were to help make my designs better.
Robot teaser
Copyright: Attribution-NonCommercial-ShareAlike 4.0 International (CC BY-NC-SA 4.0)
Author: Texas Torque, Michael Menezes
Posted on: January 1, 2020